你知道什么情況下機(jī)器人需要進(jìn)行校準(zhǔn)嗎?機(jī)器人又要怎么校準(zhǔn)呢?
時(shí)間:2021-06-20 17:25
來源:

在使用IRB360并聯(lián)機(jī)器人進(jìn)行分揀工作時(shí),在開始安裝調(diào)試階段,對機(jī)器人進(jìn)行校準(zhǔn),安裝工具并創(chuàng)建機(jī)器人工具坐標(biāo)系,根據(jù)實(shí)際的產(chǎn)品創(chuàng)建有效載荷數(shù)據(jù),再根據(jù)機(jī)器人和輸送鏈協(xié)同工作經(jīng)中常使用DSQC377B輸送鏈跟蹤板,還需要?jiǎng)?chuàng)建IO板和其他IO信號(hào)等。
什么情況下機(jī)器人需要進(jìn)行校準(zhǔn)
?工業(yè)機(jī)器人培訓(xùn)專家表示,ABB機(jī)器人本體上有一塊串行測量板SMB,其主要作用是從機(jī)器人各軸伺服電機(jī)處收集轉(zhuǎn)數(shù)計(jì)數(shù)器數(shù)據(jù),并記錄保存。該數(shù)據(jù)用于測量每個(gè)軸的速度和位置,及編碼器等數(shù)據(jù)。當(dāng)機(jī)器人正常通電是時(shí),轉(zhuǎn)數(shù)計(jì)數(shù)器器的數(shù)據(jù)由機(jī)器人主電源供電保持,當(dāng)機(jī)器人斷電后,其數(shù)據(jù)有SMB電池供電保持保存。如果轉(zhuǎn)數(shù)計(jì)數(shù)器不正確,將會(huì)導(dǎo)致機(jī)器人定位不準(zhǔn)確,點(diǎn)位數(shù)據(jù)不準(zhǔn)確等。

?東莞工業(yè)機(jī)器人專家表示: 在以下情況下,需要對機(jī)器人進(jìn)行轉(zhuǎn)數(shù)計(jì)數(shù)器更新操作:
1.SMB電池電量耗盡,沒次開機(jī)后都提示轉(zhuǎn)數(shù)計(jì)數(shù)器數(shù)據(jù)錯(cuò)誤;
2.更換SMB電池后;
3.當(dāng)轉(zhuǎn)數(shù)計(jì)數(shù)器發(fā)送故障,修復(fù)后;
4.轉(zhuǎn)數(shù)計(jì)數(shù)器與測量板之間斷開過以后
5.斷電后,機(jī)器人關(guān)節(jié)軸發(fā)送了移動(dòng);
6.系統(tǒng)報(bào)警提示“10036轉(zhuǎn)數(shù)計(jì)數(shù)器未更新”時(shí);
7.在首次安裝中,連接機(jī)器人與控制器之后,必須更新轉(zhuǎn)數(shù)計(jì)數(shù)器。
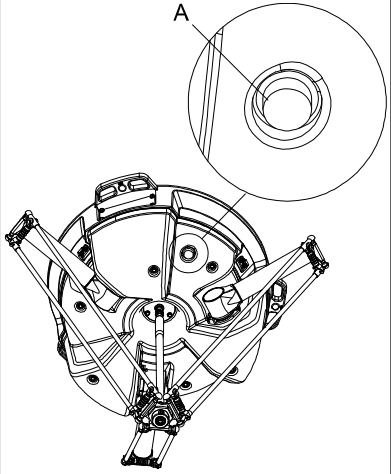
IRB30機(jī)器人手動(dòng)剎車按鈕
ABB的IRB360機(jī)器人手動(dòng)剎車按鈕:A按鈕。當(dāng)對機(jī)器人進(jìn)行校準(zhǔn)時(shí)候,需要單獨(dú)對1-4軸進(jìn)行校準(zhǔn),可以按下剎車按鈕,單獨(dú)把各軸移動(dòng)至校準(zhǔn)位置,在示教器上面對各軸進(jìn)行一個(gè)一個(gè)校準(zhǔn)。
?
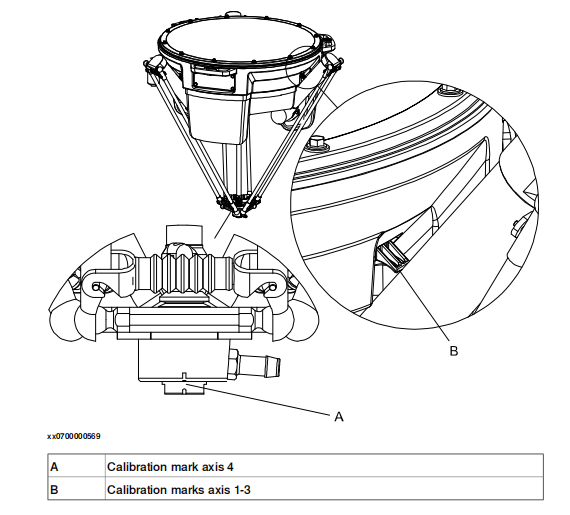
IRB30機(jī)器人各軸校準(zhǔn)位置
ABB的IRB360機(jī)器人各軸校準(zhǔn)位置,校準(zhǔn)可從1-4軸依次進(jìn)行,但無固定先后校準(zhǔn)順序。
想了解更多東莞工業(yè)機(jī)器人培訓(xùn)資訊?智通教育20年致力于東莞工業(yè)機(jī)器人培訓(xùn)、PLC培訓(xùn)、電工培訓(xùn)等培訓(xùn)項(xiàng)目,詳情聯(lián)系:0769-8707-8535.
 粵公網(wǎng)安備 44190002001278
粵公網(wǎng)安備 44190002001278