工業機器人搬運程序難?來來來,告訴你最簡單的方法!
時間:2021-05-15 11:36
來源:
一個最簡單的搬運程序
通過東莞工業機器人培訓專家在前幾篇文章的介紹,相信大家已經可以進行簡單的程序編寫了。本文繼續追隨東莞工業機器人培訓專家的腳步,根據前面的知識儲備進行一個簡單的搬運程序編寫。
任務描述:
機器人從PHome點開始,移動至夾取點P10,夾取物料后安全移動至放置點P20,放置物料后再回到PHome點。如圖7-1所示。其中p30和p40分別為垂直于p10和p20的過渡點。
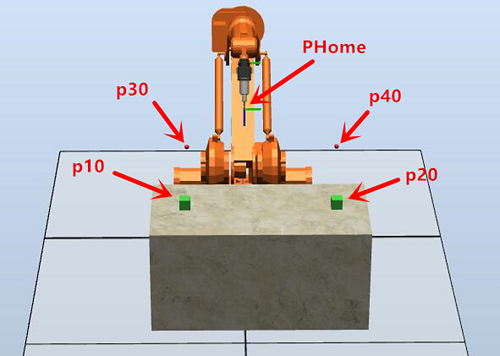
圖7-1
配置說明:

任務要求:
夾取和放置動作添加0.5s延時。
按照搬運要求,程序編輯如下:
PROC main()
MoveJ pHome, v1000, z50, tool1;!移動至home點
MoveJ p30, v1000, z10, tool1;!移動至取料點p10上方過渡點p30
MoveL p10, v1000, fine, tool1;!準確移動至取料點p10,轉彎半徑用fine
Set do_1;!夾取物料
WaitTime 0.5;!延時0.5秒,等待物料被夾穩
MoveL p30, v1000, z10, tool1;!線性移動至過渡點p30
MoveJ p40, v1000, z10, tool1;!移動至放置點p20上方的過渡點p40
MoveL p20, v1000, fine, tool1;!準確移動至放置點p20
Reset do_1;!松開夾爪,放置物料
WaitTime 0.5;!延時0.5秒,等待物料被放好
MoveL p40, v1000, z10, tool1;!線性移至過渡點p40
MoveJ pHome, v1000, fine, tool1;!回到home點,搬運完成
ENDPROC

過渡點的設定,一方面是根據編程需要,一方面也需要根據實際空間布局進行考慮。
巧用waittime等待指令,能保證程序平穩、安全運行。本小節的搬運練習中,延時0.5秒的作用就是防止物料沒有放好,機器人馬上動作會使物料跟隨動作的情況發生。
如果set、reset前有moveJ/moveL/moveC/moveABSJ等運動指令,轉彎區指令必須使用fine才可以準確輸出IO信號狀態的變化。
想了解更多東莞工業機器人培訓資訊?智通教育20年致力于東莞工業機器人培訓、PLC培訓、電工培訓等培訓項目,詳情聯系:0769-8707-8535.
 粵公網安備 44190002001278
粵公網安備 44190002001278