讓我們跟著工業(yè)機器人培訓專家一起來了解使用標識符命名指令目標位置的方法吧
時間:2021-04-16 16:11
來源:
如何使用標識符命名指令目標位置?跟著工業(yè)機器人培訓專家來了解吧!
運動指令目標點位除可以用*表示,也可以使用標識符來命名,例如:
MoveAbsJ jpos10, v1000, z50, tool0;
使用標識符來命名指令目標位置,可增強程序的可讀性,也更便于后續(xù)的修改調試。
來自東莞自動化培訓專家的一則小貼士:
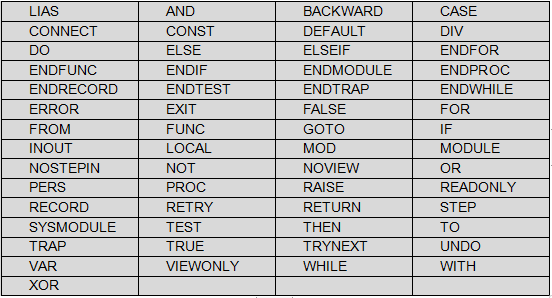
RAPID語言中標識符用于為對象命名。標識符最大32字符,不可占用保留字,必須以字母打頭,不區(qū)分大小寫,不可占用系統(tǒng)保留字。系統(tǒng)保留字,是指表4-1中的字符。
表4-1
使用標識符命名指令目標位置的操作步驟如下:1雙擊*—2單擊【新建】—3單擊“名稱:”后的【...】—4輸入名稱—5單擊【確定】—6單擊【確定】—7單擊【確定】。詳細操作圖示,如圖4-37~圖4-42所示:

圖4-37

圖4-38

圖4-39

圖4-40

圖4-41
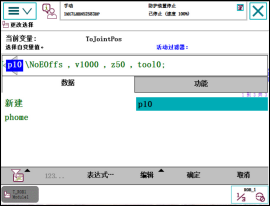
圖4-42
運動指令目標點位除可以用*表示,也可以使用標識符來命名,例如:
MoveAbsJ jpos10, v1000, z50, tool0;
使用標識符來命名指令目標位置,可增強程序的可讀性,也更便于后續(xù)的修改調試。
來自東莞自動化培訓專家的一則小貼士:
RAPID語言中標識符用于為對象命名。標識符最大32字符,不可占用保留字,必須以字母打頭,不區(qū)分大小寫,不可占用系統(tǒng)保留字。系統(tǒng)保留字,是指表4-1中的字符。
表4-1
使用標識符命名指令目標位置的操作步驟如下:1雙擊*—2單擊【新建】—3單擊“名稱:”后的【...】—4輸入名稱—5單擊【確定】—6單擊【確定】—7單擊【確定】。詳細操作圖示,如圖4-37~圖4-42所示:
圖4-37
圖4-38
圖4-39
圖4-40
圖4-41
圖4-42
 粵公網安備 44190002001278
粵公網安備 44190002001278