東莞自動化培訓專家為您介紹工業機器人性能參數
東莞工業機器人培訓專家表示,機器人的技術參數反映了機器人可勝任的工作、具有的最高操作性能等情況,是機器人選型必須考慮的問題。機器人的主要技術參數有自由度、分辨率、工作空間、工作速度、工作載荷等。
(1)自由度 機器人具有的獨立坐標軸運動的數目,末端執行器的動作不包括在內。機器人的自由度數一般等同于關節數目,目前,焊接和涂裝作業機器人多為6個自由度,而搬運、碼垛和裝配機器人多為4~6個自由度。
(2)工作范圍 又稱為作業空間,它是指機器人未安裝末端執行器時,其手腕參考點所能到達的所有空間區域,其形狀取決于機器人的自由度數和各運動關節的類型與配置,通常需要剔除機器人運動過程中可能產生碰撞、干涉的區域和奇點。
奇點又稱奇異點,機器人的奇異點是這樣規定的:由兩個或多個機器人軸的共線對準所引起的、機器人運動狀態和速度不可預測的點。以ABB IRB1410為例,當機器人關節軸5角度為0度,同時關節軸4和關節軸6的度數是一樣時,則機器人處于奇異點。
(3)工作速度 機器人在工作載荷條件下、勻速運動過程中,機械接口中心或工具中心點在單位時間內所移動的距離或轉動的角度。
(4)工作載荷 指機器人在工作范圍內任何位置上所能承受的最大負載,一般用質量、力矩、慣性矩表示。還和運行速度和加速度大小方向有關,一般規定高速運行時所能抓取的工件重量作為承載能力指標。
(5)分辨率 能夠實現的最小移動距離或最小轉動角度。
(6)工作精度 是指機器人的定位精度和重復定位精度。定位精度是指機器人執行末端到達目標位置的能力,也成為絕對精度;重復定位精度是指機器人重復定位其執行末端于同一目標位置的能力。
在機器人選型過程中,如果要知道某款機器人是否符合工作要求,可以查詢機器人的隨機光盤手冊,也可以通過官網進行查詢。下面東莞自動化培訓專家接以查詢ABB IRB1200性能參數向大家進行介紹。
1. 通過隨機光盤查閱
詳細步驟為:打開隨機光盤,1選擇語言【Chinese】—2選擇【產品規格】—3選擇【關節機器人】—4選擇【產品規格-IRB1200】即可進行查閱,如圖1-18~圖1-19所示。
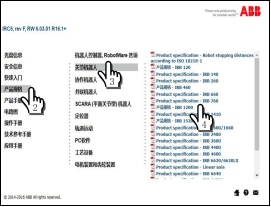
圖1-19
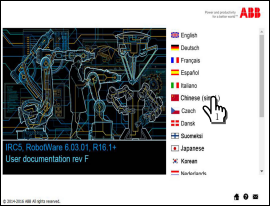
圖1-18
2. 通過官網進行查閱
訪問ABB官網也可查詢到指定型號機器人的規格參數。例如,訪問如下網址:https://new.abb.com/products/robotics/zh/industrial-robots/irb-1200,或是從ABB官網主頁按以下步驟進入:首頁—產品指南—機器人技術—工業機器人—IRB 1200,可以下載到IRB1200的產品規格描述文件,如圖1-20所示。

更多資訊:智通教育(www.wxsmenye.com)致力于工業機器人培訓、PLC培訓、電工培訓等行業課程,詳情聯系:0769-8707-8535.
 粵公網安備 44190002001278
粵公網安備 44190002001278