東莞自動化培訓老師帶大家一起領略機器人魚鱗焊工的“工藝美”
時間:2021-04-02 16:46
來源:
各大院校機器人專業共建,機器人維護保養調試,工廠機器人自動化改造,企業定向培訓合作,熱烈歡迎大家前來致電咨詢0769-8707-8535.
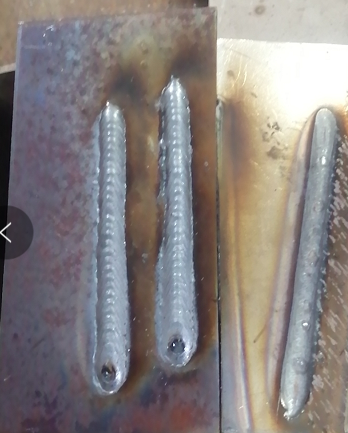
機器人魚鱗焊接想必有些人比較陌生,其實,它是一種工藝美,下面我們就跟著東莞自動化培訓的辛老師一起來欣賞欣賞機器人魚鱗焊接的美圖吧。
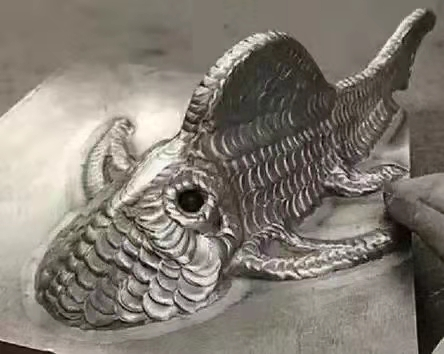




以上圖片源于網絡
| 參數名稱 | 參數注釋 |
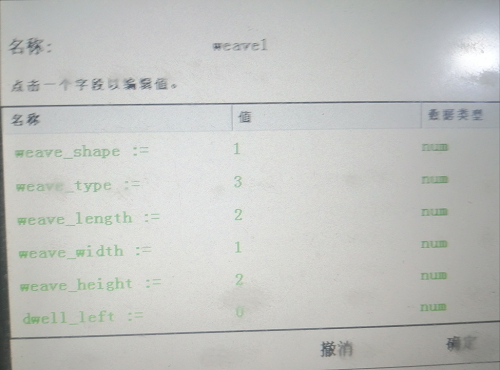
| Weave_shape | 擺動的形狀 |
| Weave_type | 擺動的模式 |
| Weave_length | 一個周期前進的距離 |
| Weave_width | 擺動的寬度 |
| Weave_height | 擺動的高度 |
| Dwell_left | 左側單邊停留時間 |
| Dwell_center | 中間單邊停留時間 |
| Dwell_right | 右側單邊停留時間 |
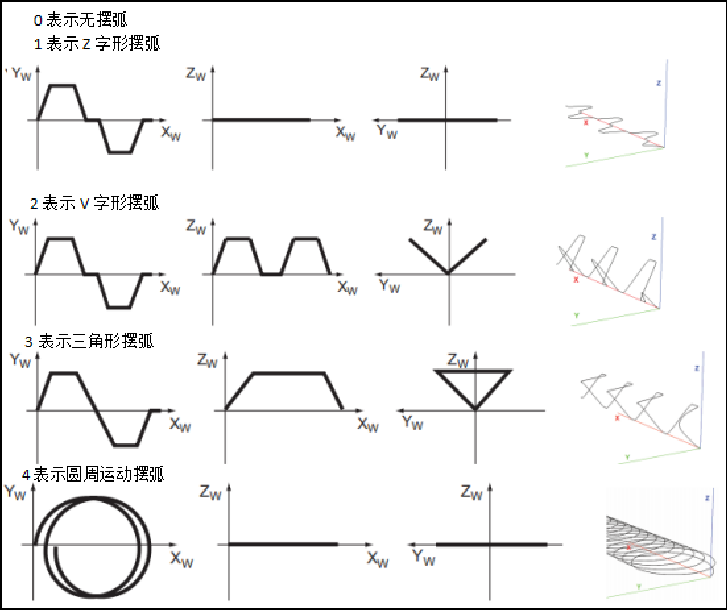
Weave_shape:擺動的形狀(0表示沒有擺動,1表示Z字形擺動,2表示V字形擺動,3表示三角形擺動,4表示圓周運動擺弧)。
Weave_type:擺動的模式(0表示機器人的6根軸都參與擺動,1表示機器人的5軸和6軸都參與擺動,2表示機器人的1、2、3軸都參與擺動,3表示機器人的4、5、6軸都參與擺動)。
Weave_length:一個擺動周期機器人工具坐標向前移動的距離。
Weave_width:擺動的寬度。
Weave_height:擺動的高度,只有在三角形擺動和V形擺動時此參數有效
注:焊接速度/weave_length不能超過2Hz

備注:文中有些圖片來自網絡,如有侵權請及時聯系刪除。若有疑問,歡迎大家致電咨詢, 一起學習,共同成長。
更多資訊:智通教育(www.wxsmenye.com)致力于東莞工業機器人培訓、東莞PLC培訓、東莞電工培訓等行業課程,詳情聯系:0769-8707-8535.
 粵公網安備 44190002001278
粵公網安備 44190002001278