嘿!快來跟我一起掌握ABB機器人固定工具的創建方法吧!
智通教育鐘老師表示,大家在創建機器人的坐標時,可能沒有關注坐標數據包函的各個參數。其實在坐標參數里有個參數是標明當前工具坐標是固定還是活動的。即:

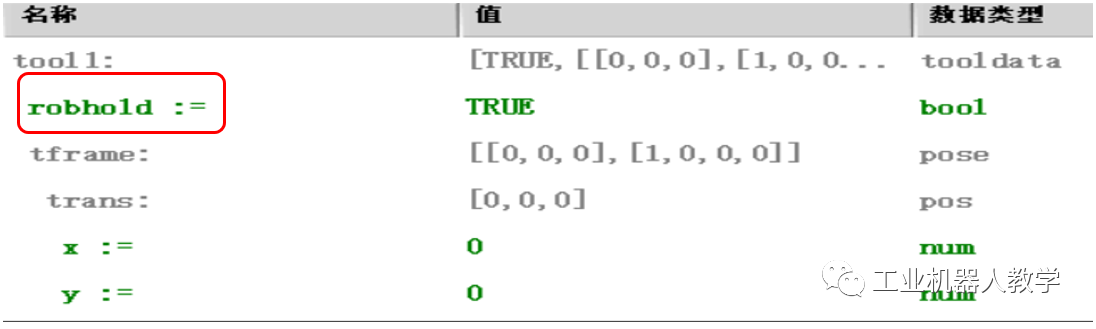
進入程序數據,查看工具工件數據詳情,如下圖所示↓↓↓
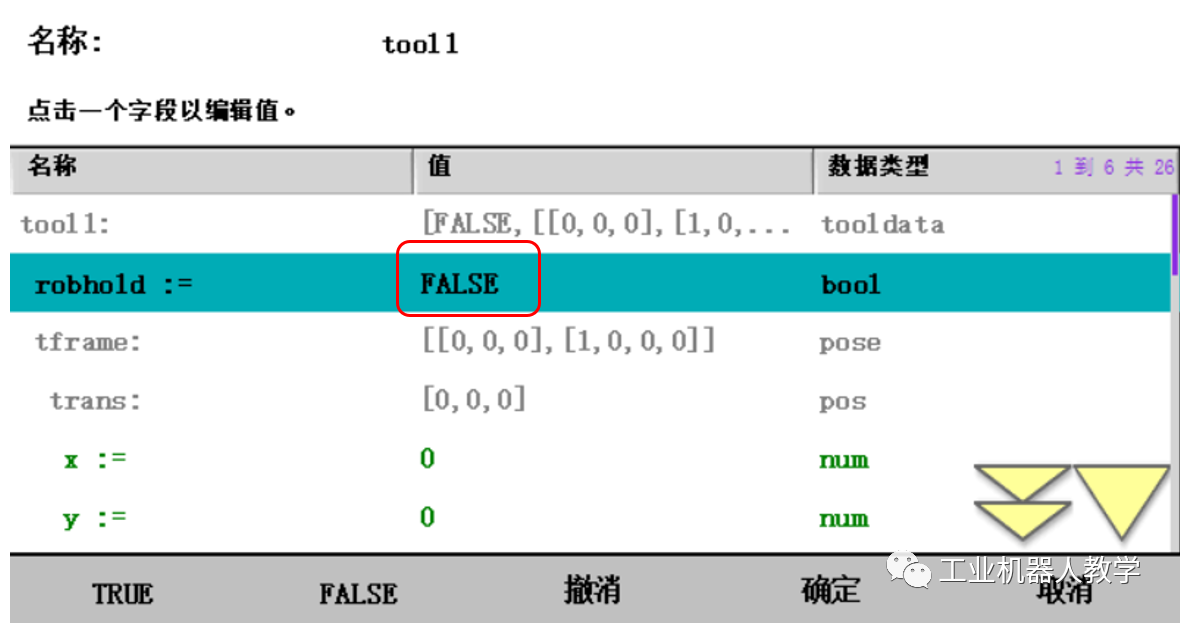
工具數據詳細列表
手冊的說明是這樣的:
Robhold 其數據類型為bool。用于定義機械臂是否夾持工具,當值為TRUE,表明機械臂正夾持著工具,即為活動工具。當值為FALSE,表明機械臂未夾持工具,即為固定工具。
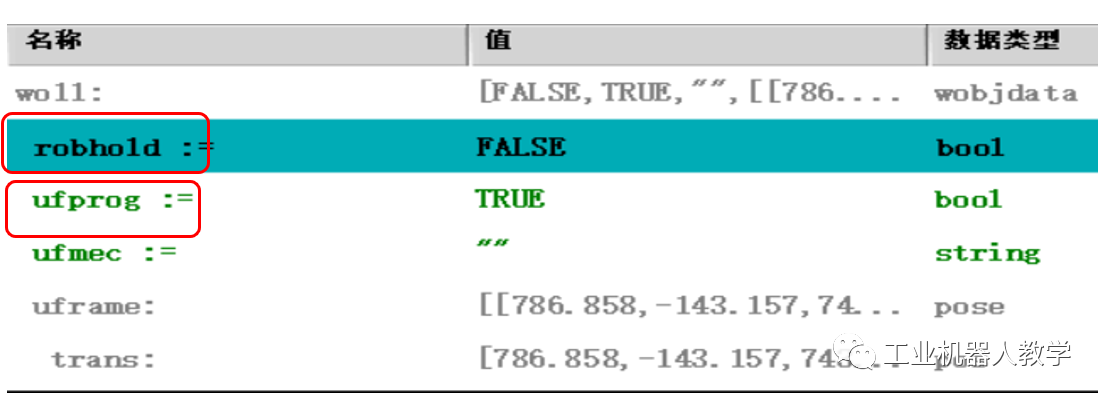
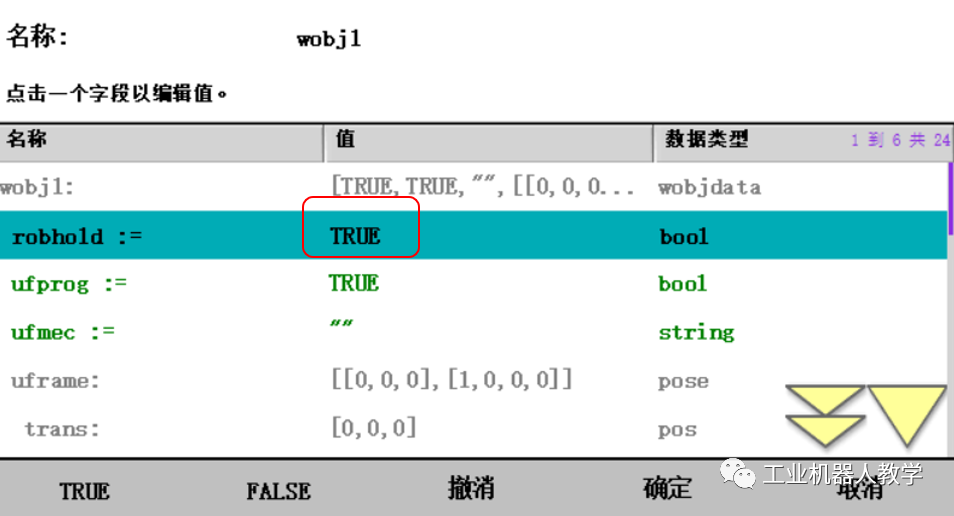
工件數據詳細列表
手冊的說明是這樣的:
Robhold 其數據類型為bool。用于規定實際程序任務中的機械臂是否正夾持著工件,當值為TRUE,表明械臂正夾持著工件,即使用一個固定工具。當值為FALSE,表明機械臂未夾持著工件,即機械臂正夾持著工具。
Ufprog(user frame programmed) 其數據類型為bool,表明當前坐標是否支持被其他機械裝置驅動。即可否協同運動。
規定是否使用固定的用戶坐標系:
TRUE:固定的用戶坐標系。
FALSE:可移動的用戶坐標系,即使用協調外軸。同時以半協調或同步協調模式用于MultiMove系統。
Ufmec(user frame mechanical unit) 其數據類型為string,表明用哪個機械單元來驅動當前工件坐標。即把機械單元的名稱寫在此處。
用于協調機械臂移動的機械單元。僅在可移動的用戶坐標系中進行規定(ufprog為FALSE)。
規定系統參數中所定義的機械單元名稱,例如,orbit_a。
固定工具的創建方法
從手冊中可以看出,當工具坐標中Robhold 為TRUE時,表明當前機器人正夾持工具,即是活動的工具。機器人的運動中,兩個坐標只能是一個固定一個活動,那么,對應的工件坐標只能是固定的了。所以,重點來了,我們要創建固定的工具坐標,那么必需要有一個活動的工件坐標。具體操作步驟如下:
第一步,創建兩個坐標,一個是固定的工具坐標(即參數Robhold 為FALSE),一個是活動的工件坐標(即參數Robhold 為TRUE)。
建一個工具坐標,Robhold 為FALSE。注意修改Mass值為正數。如下圖:
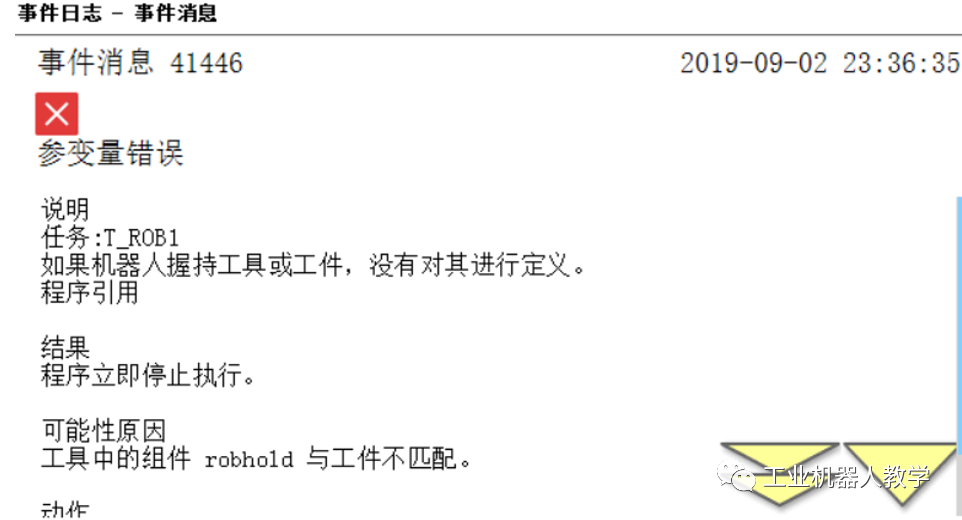
會出現如下報錯。先不確認,這是因為沒有活動的工件坐標。
創建一個工件坐標,Robhold 為TRUE。如下圖:
第二步,選擇一個已知工具數據的工具坐標下,定義固定工具坐標的原點和方向。跟平時定義工具坐標方法一樣。只不過此時工具坐標已是固定在選定的工具面或指定的工具點上。
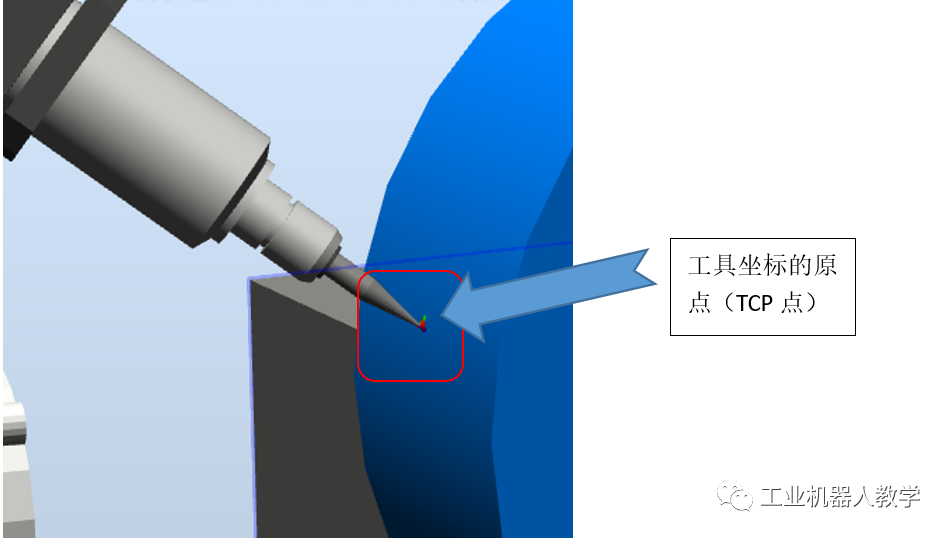
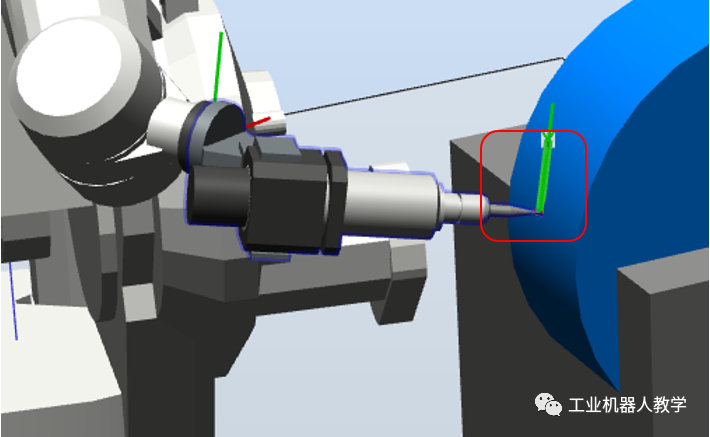
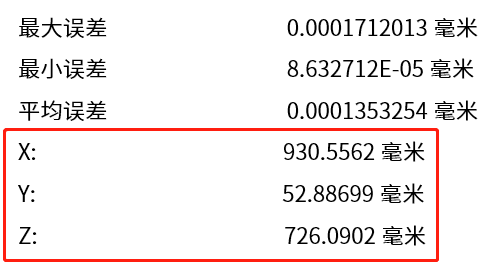
上圖的X,Y,Z即是當前工具坐標在基坐標的位置。
第三步,選擇當前定的固定的工具坐標,選擇對應活動的工件坐標。機器人設為重定位運動,體驗機器人無論在哪個位置,都會沿所定工具坐標做重定運動的效果。快來試一下吧!
更多資訊:智通教育(www.wxsmenye.com)致力于工業機器人培訓、PLC培訓、電工培訓等行業課程,詳情聯系:0769-8707-8088.
 粵公網安備 44190002001278
粵公網安備 44190002001278