機器人學習-激光導航移動機器人的工作原理-工業機器人培訓
今天我們工業機器人培訓學院帶大家學習一個新潮的機器人-激光導航移動機器人。相較于傳統的磁條導航、二維碼導航移動機器人,激光導航移動機器人會更靈活,下面我們一起來和智通看看機器人學習吧。
對于磁條導航、二維碼導航移動機器人,大家可以直觀的看到地面上的磁條、二維碼,從而知道移動機器人是根據地面上的磁條、二維碼進行定位導航,按照既定的路線行駛的;但是對于激光導航移動機器人,地面上沒有磁條、二維碼等這些輔助定位設施,絕大多數人就應該充滿疑惑了吧。
那么激光導航移動機器人是如何工作的呢?激光導航的方式又分為兩種,激光反光板導航和激光自然輪廓導航。
一、激光反光板導航工作原理
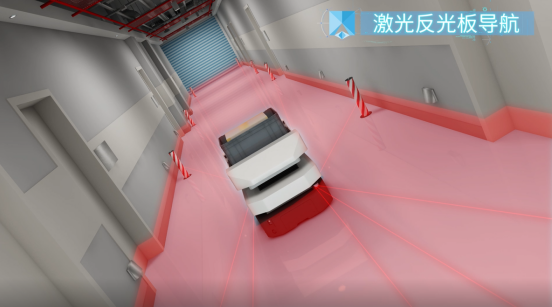
激光反光板導航是通過激光雷達連續不斷的發射激光脈沖,由旋轉光學機構將激光脈沖按一定角度間隔(角度分辨率)發射向掃描角度內的各個方向而形成一個以徑向坐標為基準的二維掃描面。激光雷達通過識別掃描范圍內的物體表面反射率,來識別激光反光板的位置信息,再通過最少三個反光板的位置計算出激光雷達所在的AGV的位置和姿態信息。
激光反光板的內部是三棱鏡結構,可以實現入射光的同路反射,反射率遠遠大于普通物體表面反射率,所以激光雷達能夠輕易識別出反光板
二、激光自然輪廓導航工作原理

激光自然輪廓導航則是基于SLAM的導航原理。SLAM即同步定位與建圖,指在未知的環境中,機器人通過自身所攜帶的內部傳感器(編碼器、IMU等)和外部傳感器(激光傳感器或者視覺傳感器)來對自身進行定位,并在定位的基礎上利用外部傳感器獲取的環境信息增量式的構建環境地圖。
在地圖構建過程中,通過激光傳感器對周圍自然環境中的物體輪廓(如墻壁、柱子或其它固定物體)進行探測、學習,包括距離、角度、被測物體反射率等信息,然后通過SLAM算法等實現移動機器人的定位導航。
由于激光不受光線限制、抗干擾性強,通過激光進行探測獲得的數據具有精度高,實時性強,數據穩定等特點,且激光雷達安裝方便,非常適用于移動機器人導航。
和傳統的磁條導航、二維碼導航及激光反光板導航相比較,激光自然輪廓導航方式靈活度高、穩定性強,受外界干擾因素低。另一方面,無需鋪設磁條、二維碼、反光柱等輔助定位設施,無需對用戶現場車間環境進行改造,前期實施快,后期維護成本低,具有明顯的優勢。
現在的機器人也是迅速發展的,我們的學習方向也是越來越多,但是首先我們需要接受正規專業的機器人培訓,如果也想從事機器人行業?快來智通職業技能培訓學院吧。
關注智通教育(www.wxsmenye.com)致力于培養工業機器人技術技能人才,目前學院開始機器人技術課程,工業機器人技術、機器人培訓課程、工業機器人集成工程師、智能制造全能工程師等智能制造行業課程;詳情請聯系:0769-8707-8088。
 粵公網安備 44190002001278
粵公網安備 44190002001278